mujoco-200-tutorials-Lec12: Inverse Kinematics using Nonlinear Optimization
lecture_url
mujoco docs
NLopt docs
이번에는 IK를 nonlinear optimization sw인 NLopt를 이용해서 풀어보자.
거의 치트키인거같으니까 너무 심취하지말자..
Full code
test.c
constrained.c
xref_zref.m
test.xml
mjData* dsim (for simulator)
mjData* d(for robot)
mjData* dsim(for simulator) 으로 data를 분리한다.
1
2
3
4
5
6
7
8
9
10
mjData* d = NULL;
mjData* dsim = NULL;
// make data
d = mj_makeData(m);
dsim = mj_makeData(m);
mj_deleteData(d);
mj_deleteData(dsim);
in constrained.c
1
2
3
4
extern mjModel* m;
extern mjData* dsim;
get joint angle using NLopt
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
extern mjModel* m;
extern mjData* dsim;
double x_target;
double z_target;
void simulator(double Xin[2], double Xout[2]) {
dsim->qpos[0] = Xin[0];
dsim->qpos[1] = Xin[1];
dsim->ctrl[0] = dsim->qpos[0]; dsim->ctrl[2] = dsim->qpos[1];
mj_forward(m,dsim);
Xout[0] = dsim->sensordata[0];
Xout[1] = dsim->sensordata[2];
}
double mycost(unsigned n, const double *x, double *grad, void *costdata)
{
double cost = 0;
return cost;
}
double myequalityconstraints(unsigned m, double *result, unsigned n,
const double *x, double *grad,
void *equalitydata)
{
double Xout[2] = {0};
simulator(x,Xout);
result[0] = x_target - Xout[0]; //dsim->sensordata[0];
result[1] = z_target - Xout[1]; //dsim->sensordata[2];
}
create Xref (lemniscate)
\[x = \frac{a\cos{t}}{1+\sin^2{t}}\ y = \frac{a\sin{t}\cos{t}}{1+\sin^2{t}}\]1
2
3
4
5
6
void curve(double t, double Xref[2]) {
double denominator = 1 + sin(omega*t)*sin(omega*t);
Xref[0] = center_x + a*cos(omega*t)/denominator;
Xref[1] = center_z + a*sin(omega*t)*cos(omega*t)/denominator;
}
주의사항
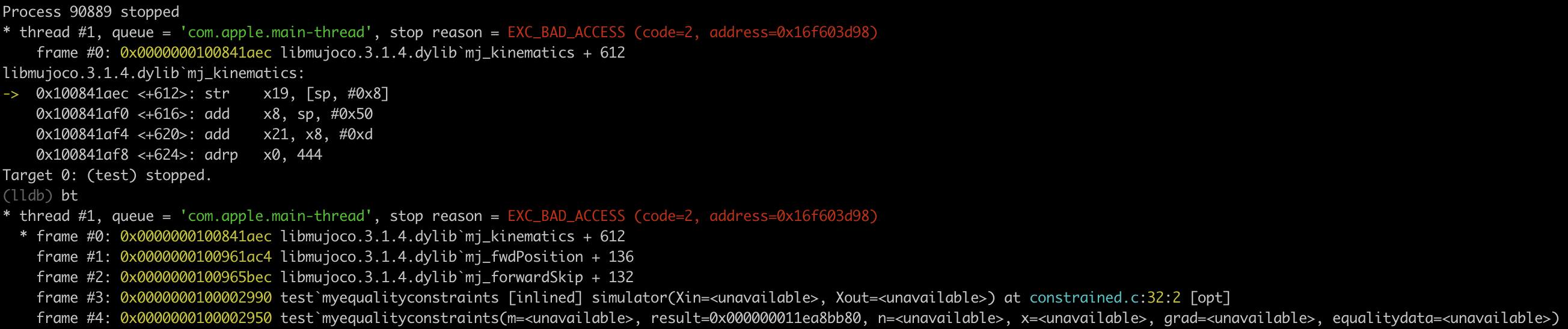
simulator에서 joint angle input에 대한 tip position output을 구하기위해
mjData* dsim을 사용했다. 여기서 주의해야할 점이 있다.
dsim도 integrator=”RK4”계산을 하면서 control callback을 사용한다는 것이다.
즉, callback에서 inverse kinematics를 호출하면 inverse kinematics내부에서도 callback을 호출(mj_forward내에서 callback호출)하기때문에
재귀적으로 무한 호출하게 된다!
다음의 코드는 internal callaback을 사용할 때, 무한 재귀호출이 발생하는 상황이다.
이거때문에 반나절을 날렸다..
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
int main() {
mjcb_control = mycontroller;
}
void mycontroller(const mjModel* m, mjData* d)
{
// mycontroller가 콜백이면,
// 콜백내에서 다시 콜백을 호출할수 있는 inverse_kinematics()를 호출하기때문에 무한 호출이고, 스택 overflow가 발생하여 segmentation fault가 발생한다.
inverse_kinematics(Xin,Xref);
}
void inverse_kinematics(double Xin[2],double Xref[2]) {
nlopt_add_equality_mconstraint(opt, m_eq, myequalityconstraints, NULL, tol_eq);
}
double myequalityconstraints(unsigned m, double *result, unsigned n,
const double *x, double *grad,
void *equalitydata)
{
simulator(x,Xout);
}
void simulator(double Xin[2], double Xout[2]) {
mj_forward(m,dsim); // **recursive call!**
}
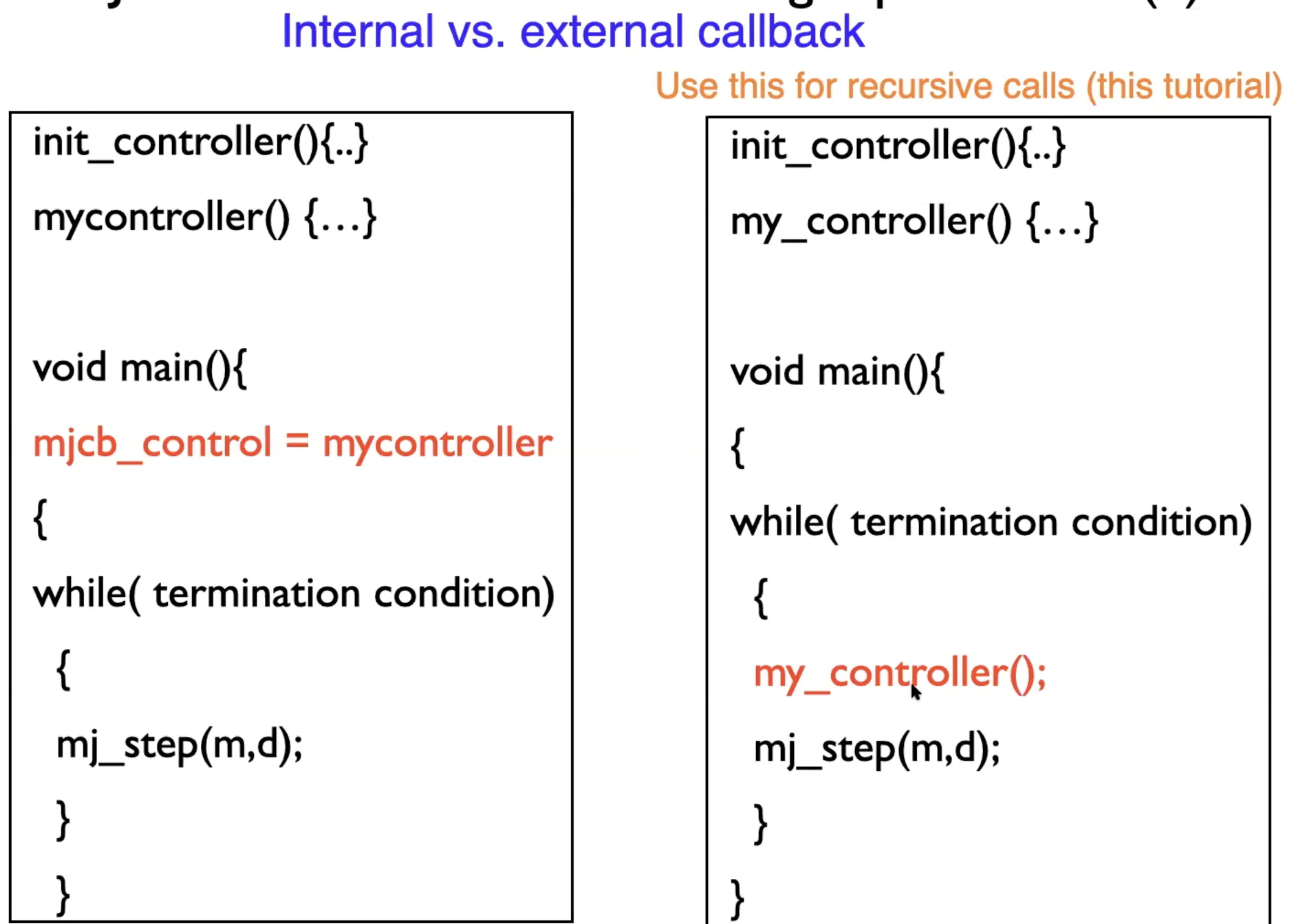
다음은 mjcb_control에 대한 docs의 설명이다.
The control callback is called from within mj_forward and mj_step, just before the controls and applied forces are needed. When using the RK integrator, > it will be called 4 times per step. The alternative way of specifying controls and applied forces is to set them before mj_step, or use mj_step1 and mj_step2.
해결책
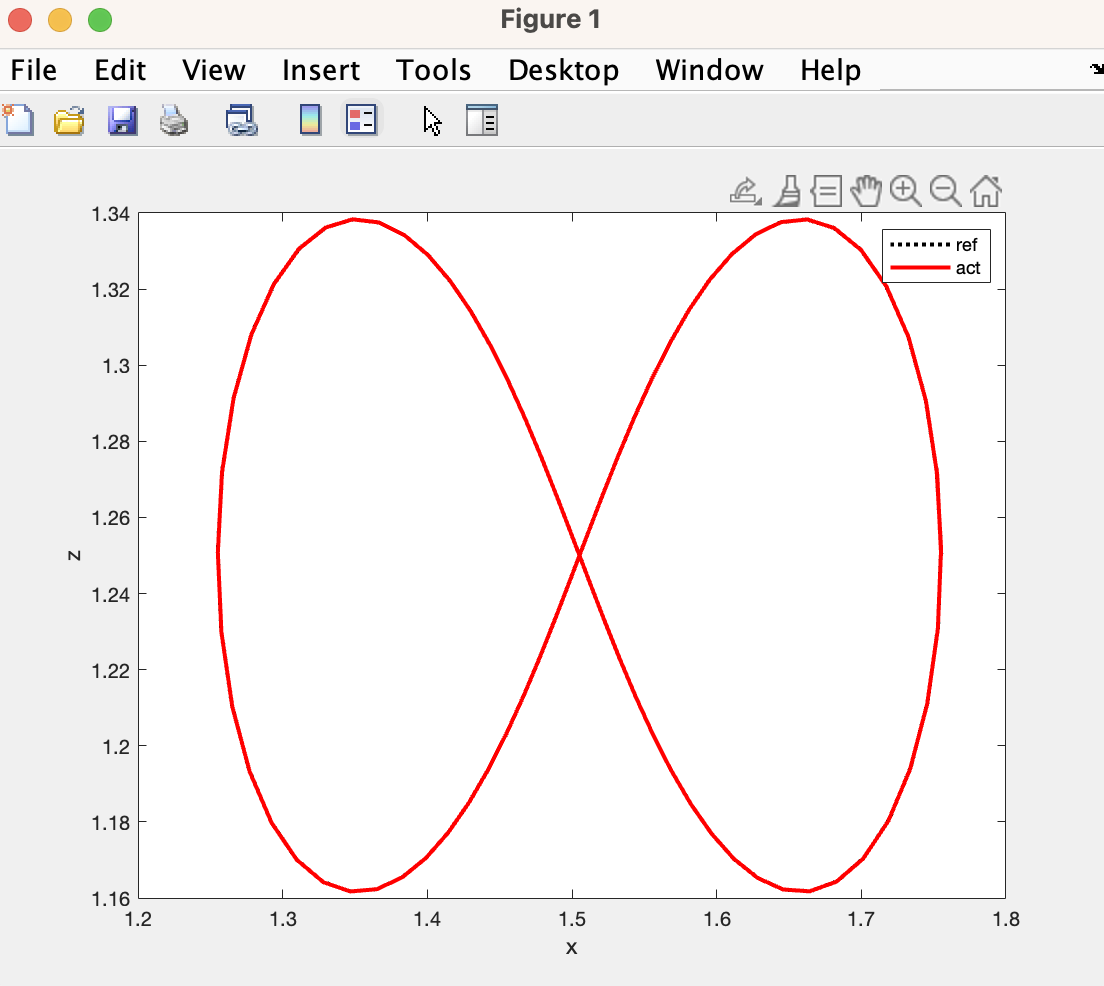
재귀호출을 막기위해, 다음과 같이 callback을 명시적으로 루프에서 실행한다. 그림과 같이 성공적으로 Xout이 Xref를 추종하는 제약조건을 준수하는 것을 볼 수 있다.
1
2
3
4
5
6
int main() {
// mjcb_control = mycontroller;
while(!glfwWindowShouldClose(window)) {
mycontroller(m,d);
}
}