mujoco-200-tutorials-Lec13: 2D Biped
lecture_url
mujoco docs
NLopt docs
slope를 내려가는 bipedal motion을 만들어보자!
(hip joint의 gain을 tuning하지않으면 drunken gait이다. chaotic solution을 만족하는 gain을 tuning하면 대칭적인 gait를 얻을 수 있다.)
drunken gait를 유발하는 gain: kp=”10”, kv=”1”
chaotic solution에 가까운 gain : kp=”4”, kv=”1”
drunken gait: 양발의 보폭이 다른 보행.
혼돈(Chaos): 현재가 미래를 결정하지만, 대략적인 현재가 미래를 대략적으로 결정하지 못하는 경우.
Full code
biped model and DOF
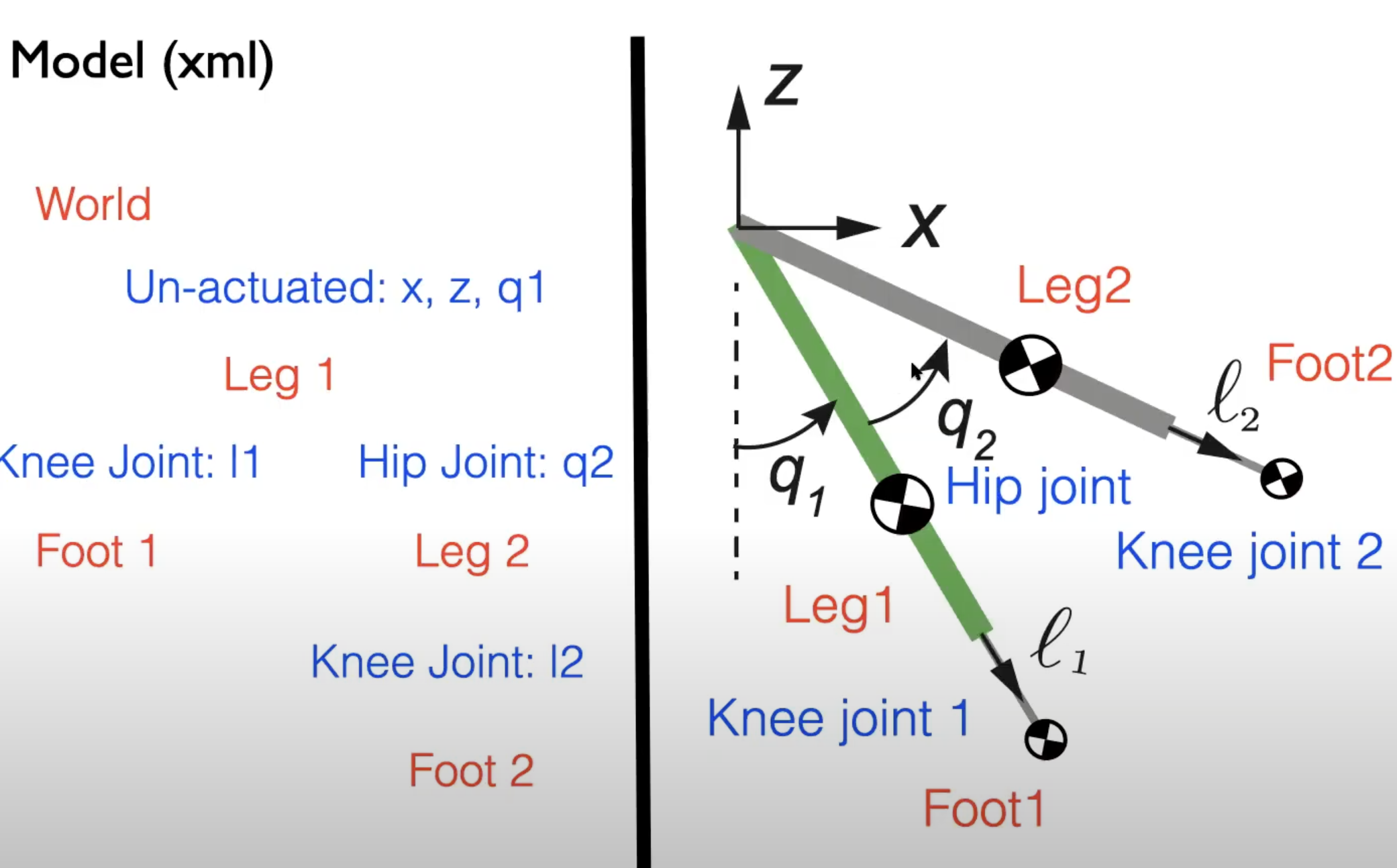
q1, q2는 world frame에 대한 angle이며, quaternion으로 표현되기때문에 물리적으로 인식하기쉽게 코딩할 때 euler angle로 바꾼다.
fakey slope 구현
world좌표계기준으로 실제로 경사진 plane을 만들면 좌표계산이 어려워진다.
plane과 중력의 관계를 생각해보면, plane대신 중력을 기울여도 동일한 motion을 만들어낼 수 있다.
따라서 중력을 다음과 같이 설정한다.
1
2
3
4
5
6
int main() {
double gamma = 0.1; // ramp slope
double gravity = 9.81;
m->opt.gravity[0] = gravity*sin(gamma);
m->opt.gravity[2] = -gravity*cos(gamma);
}
FSM for bipedal motion for z_foot (swing)
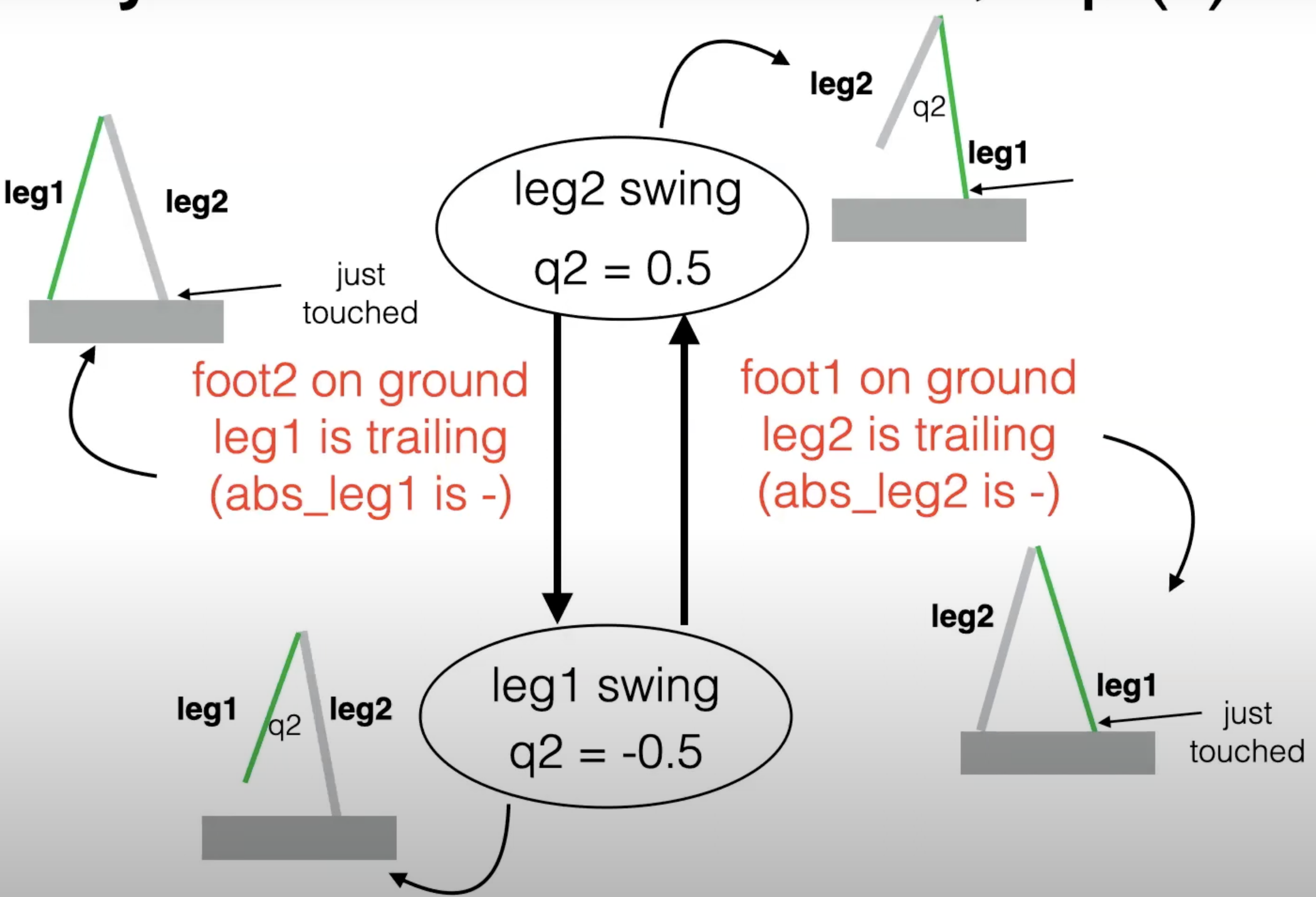
bipedal motion의 phase를 생각해보면,
한쪽 발이 지면에 닿는 순간, 구동력이 제공되고(swing의 원인. leg2에 대해 작용하고, leg1에 대해 반작용),
전체 body의 무게중심은 중력방향이므로 평면기준으로 전진한다.
전진 중, 나머지 발은 끌리게된다(trail + swing).
trail + swing이기때문에, 여기까지 구현한건 완성된게 아니다.(아래 영상 참고)
발이 끌리게 된다면, swing을 하더라도 앞으로 나아갈 수 없다.
발이 끌리지 않게 하려면 knee에 대한 fsm까지 구현해야한다 (다음 절에서 구현).
 \
\
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
void mycontroller(const mjModel* m, mjData* d)
{
// write control here
int body_no;
double quat0, quatx, quaty, quatz;
double euler_x, euler_y, euler_z;
double abs_leg1, abs_leg2;
double q1 = d->qpos[0]; double u1 = d->qvel[0];
double x = d->qpos[1]; double vx = d->qvel[1];
double z = d->qpos[2]; double vz = d->qvel[2];
double l1 = d->qpos[3]; double l1dot = d->qvel[3];
double q2 = d->qpos[4]; double u2 = d->qvel[4];
double l2 = d->qpos[5]; double l2dot = d->qvel[5];
// state etimate
body_no = 1;
quat0 = d->xquat[4*body_no]; quatx = d->xquat[4*body_no+1];
quaty = d->xquat[4*body_no+2]; quatz = d->xquat[4*body_no+3];
quat2euler(quat0, quatx, quaty, quatz, &euler_x, &euler_y, &euler_z);
// printf("body:%d, euler angle: %f %f %f\n", body_no, euler_x, euler_y, euler_z);
abs_leg1 = -euler_y;
body_no = 3;
quat0 = d->xquat[4*body_no]; quatx = d->xquat[4*body_no+1];
quaty = d->xquat[4*body_no+2]; quatz = d->xquat[4*body_no+3];
quat2euler(quat0, quatx, quaty, quatz, &euler_x, &euler_y, &euler_z);
// printf("body:%d, euler angle: %f %f %f\n", body_no, euler_x, euler_y, euler_z);
abs_leg2 = -euler_y;
body_no = 2;
z_foot1 = d->xpos[3*body_no+2];
body_no = 4;
z_foot2 = d->xpos[3*body_no+2];
// all transitions
if(fsm_hip == fsm_leg2_swing && z_foot2 <= 0.05 && abs_leg1 < 0) {
fsm_hip = fsm_leg1_swing;
}
else if(fsm_hip == fsm_leg1_swing && z_foot1 <= 0.05 && abs_leg2 < 0) {
fsm_hip = fsm_leg2_swing;
}
// all actions
if (fsm_hip == fsm_leg2_swing) {
d->ctrl[0] = 0.5;
}
else if(fsm_hip == fsm_leg1_swing) {
d->ctrl[0] = -0.5;
}
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_chk_period==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
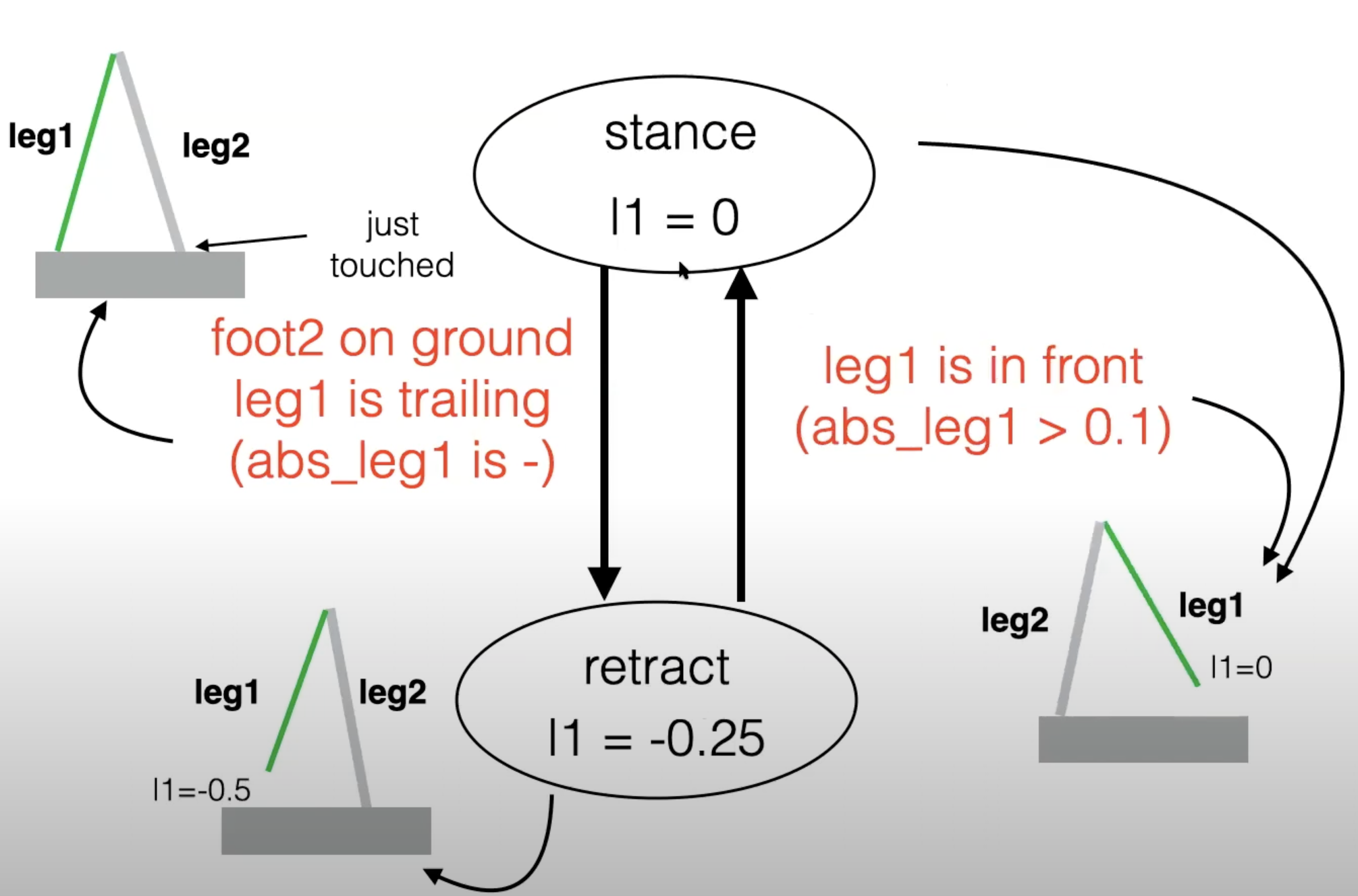
FSM for bipedal motion for knee (stance_retract)
 \
\
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
void mycontroller(const mjModel* m, mjData* d)
{
// write control here
int body_no;
double quat0, quatx, quaty, quatz;
double euler_x, euler_y, euler_z;
double abs_leg1, abs_leg2;
double x = d->qpos[0]; double vx = d->qvel[0];
double z = d->qpos[1]; double vz = d->qvel[1];
double q1 = d->qpos[2]; double u1 = d->qvel[2];
double l1 = d->qpos[3]; double l1dot = d->qvel[3];
double q2 = d->qpos[4]; double u2 = d->qvel[4];
double l2 = d->qpos[5]; double l2dot = d->qvel[5];
// state etimate
body_no = 1;
quat0 = d->xquat[4*body_no]; quatx = d->xquat[4*body_no+1];
quaty = d->xquat[4*body_no+2]; quatz = d->xquat[4*body_no+3];
quat2euler(quat0, quatx, quaty, quatz, &euler_x, &euler_y, &euler_z);
// printf("body:%d, euler angle: %f %f %f\n", body_no, euler_x, euler_y, euler_z);
abs_leg1 = -euler_y;
body_no = 3;
quat0 = d->xquat[4*body_no]; quatx = d->xquat[4*body_no+1];
quaty = d->xquat[4*body_no+2]; quatz = d->xquat[4*body_no+3];
quat2euler(quat0, quatx, quaty, quatz, &euler_x, &euler_y, &euler_z);
// printf("body:%d, euler angle: %f %f %f\n", body_no, euler_x, euler_y, euler_z);
abs_leg2 = -euler_y;
body_no = 2;
z_foot1 = d->xpos[3*body_no+2];
body_no = 4;
z_foot2 = d->xpos[3*body_no+2];
// all transitions
if(fsm_hip == fsm_leg2_swing && z_foot2 < 0.05 && abs_leg1 < 0) {
fsm_hip = fsm_leg1_swing;
printf("fsm_leg1_swing\n");
}
else if(fsm_hip == fsm_leg1_swing && z_foot1 < 0.05 && abs_leg2 < 0) {
fsm_hip = fsm_leg2_swing;
printf("fsm_leg2_swing\n");
}
if(fsm_knee1 == fsm_knee1_stance && z_foot2 < 0.05 && abs_leg1 < 0) {
fsm_knee1 = fsm_knee1_retract;
printf("fsm_knee1_retract\n");
}
else if(fsm_knee1 == fsm_knee1_retract && abs_leg1 > 0.1) {
fsm_knee1 = fsm_knee1_stance;
printf("fsm_knee1_stance\n");
}
if(fsm_knee2 == fsm_knee2_stance && z_foot1 < 0.05 && abs_leg2 < 0) {
fsm_knee2 = fsm_knee2_retract;
printf("fsm_knee2_retract\n");
}
else if(fsm_knee2 == fsm_knee2_retract && abs_leg2 > 0.1) {
fsm_knee2 = fsm_knee2_stance;
printf("fsm_knee2_stance\n");
}
// all actions
if (fsm_hip == fsm_leg2_swing) {
d->ctrl[0] = 0.5;
}
else if(fsm_hip == fsm_leg1_swing) {
d->ctrl[0] = -0.5;
}
if(fsm_knee1 == fsm_knee1_stance) {
d->ctrl[2] = 0;
}
else if(fsm_knee1 == fsm_knee1_retract) {
d->ctrl[2] = -0.25;
}
if(fsm_knee2 == fsm_knee2_stance) {
d->ctrl[4] = 0;
}
else if(fsm_knee2 == fsm_knee2_retract) {
d->ctrl[4] = -0.25;
}
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_chk_period==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
주의사항
body, geometry, joint 순으로 종속성을 엄밀히 고려하며 xml을 작성해야한다!
joint간의 순서도 종속성이 있다.
1번째 case는 z의 하위에 pin이 있지 않기때문에, pin은 제자리에 있다.
 \
\
1
2
3
4
<!-- pin이 따라가지 못함 -->
<joint name="pin" type="hinge" pos="0 0 0.5" axis="0 -1 0" />
<joint name="x" type="slide" pos="0 0 0.5" axis = "1 0 0" />
<joint name="z" type="slide" pos="0 0 0.5" axis = "0 0 1" />
2번째 case는 z의 하위에 pin이 있기때문에, pin이 z(leg1)를 따라간다.
 \
\
1
2
3
4
<!-- pin이 따라감 -->
<joint name="x" type="slide" pos="0 0 0.5" axis = "1 0 0" />
<joint name="z" type="slide" pos="0 0 0.5" axis = "0 0 1" />
<joint name="pin" type="hinge" pos="0 0 0.5" axis="0 -1 0" />
다음과 같이 swing할 때, pin의 위치는 d->ctrl[0]에 해당하는 leg2의 hip을 돌릴 때 반작용으로 영향을 받는다.
따라서 보행이 불안정해져서 넘어질 수 밖에 없다.
1
2
3
if (fsm_hip == fsm_leg2_swing) {
d->ctrl[0] = 0.5;
}