mujoco-200-tutorials-Lec5: Finite State Machine and Trajectory Tracking for Double Pendulum
what is Finite State Machine(FSM)?
how to create trajectory?
how to follow trajectory?
Full code
test.cc test.xml solve_polynomial.m time_position_plot.m
FSM
FSM은 유한한 개수의 상태를 가질 수 있는 오토마타이다. 이번 경우, state가 변할 때 특정 point에서 다른 point로 제어목표를 옮겨가는 로직이므로, set point control이라고 한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
void mycontroller(const mjModel* m, mjData* d)
{
//write control here
// transition
if(fsm_state == fsm_hold && d->time >= t_hold) {
fsm_state = fsm_swing1;
}
if(fsm_state == fsm_swing1 && d->time >= t_hold+t_swing1) {
fsm_state = fsm_swing2;
}
if(fsm_state == fsm_swing2 && d->time >= t_hold+t_swing1+t_swing2) {
fsm_state = fsm_stop;
}
// action
// start: q0 = -1; q1 = 0
// intermediate: q0 = 0; q1 = -1.57(-pi/2)
// end: q0 = 1; q1 = 0
double q0, q1;
if(fsm_state == fsm_hold) {
q0 = -1; q1 = 0;
d->ctrl[1] = q0;
d->ctrl[4] = q1;
}
else if(fsm_state == fsm_swing1) {
q0 = 0; q1 = -1.57;
d->ctrl[1] = q0;
d->ctrl[4] = q1;
}
else if(fsm_state == fsm_swing2) {
q0 = 1; q1 = 0;
d->ctrl[1] = q0;
d->ctrl[4] = q1;
}
else if(fsm_state == fsm_stop) {
q0 = 1; q1 = 0;
d->ctrl[1] = q0;
d->ctrl[4] = q1;
}
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_chk_period==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
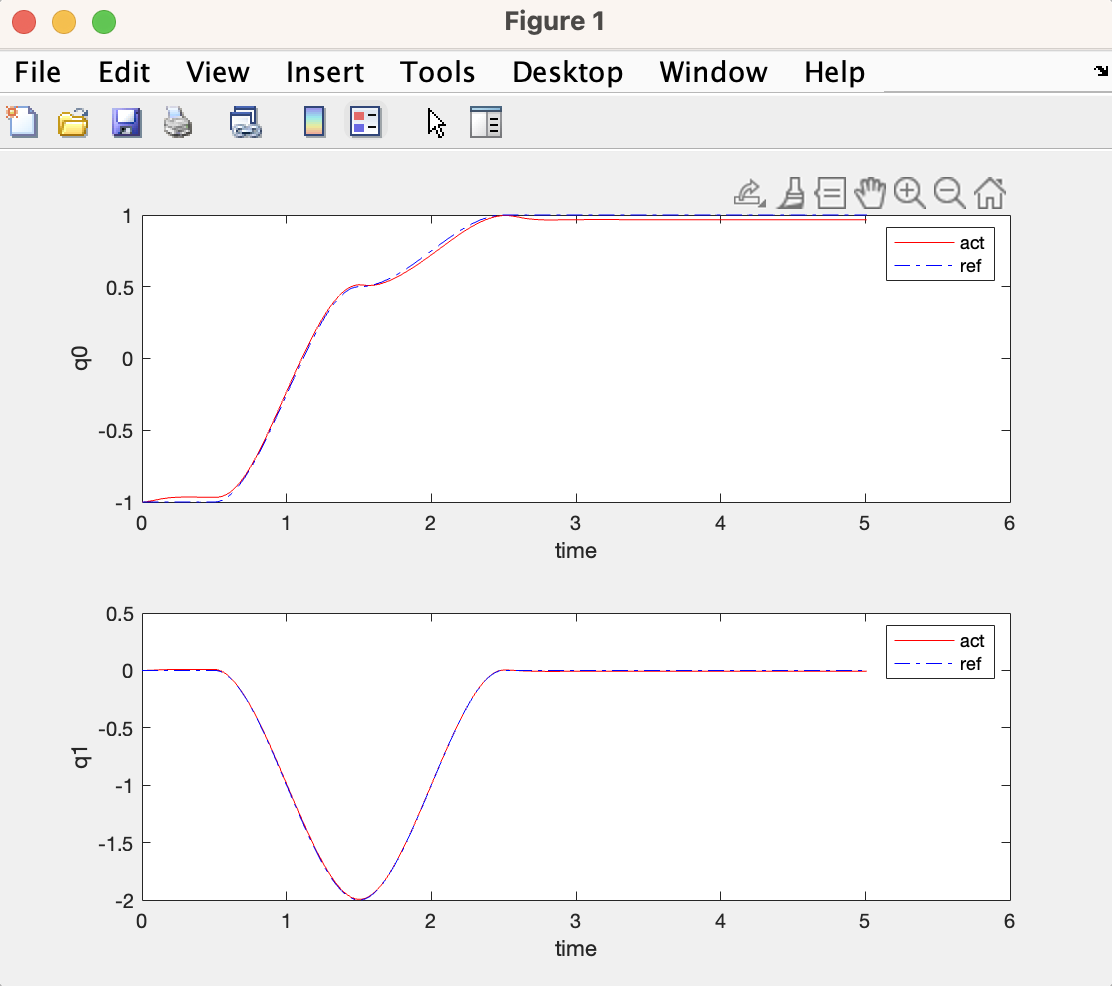
trajectory following control
boundary condition으로 초기, 종료 시 position, velocity, acceleration을 만족하도록, trajectory를 5차 polynomial로 정하는 것이 무난하다.
\[q(t) = a_0 + a_1t + a_2t^2 + a_3t^3 + a_4t^4 + a_5t^5\]하지만 이번 경우, B.C.는 hold, stop의 position, velocity만 존재하므로 3차 polynomial을 사용한다.
PD controller는 desired position과 desired velocity의 error를 동시에 수렴시킬 수 있다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
void mycontroller(const mjModel* m, mjData* d)
{
//write control here
double t = d->time;
// transition
if(fsm_state == fsm_hold && d->time >= t_hold) {
fsm_state = fsm_swing1;
double q_0[2] = {0}, q_f[2] = {0};
q_0[0] = -1; q_0[1] = 0;
q_f[0] = 0.5; q_f[1] = -2;
generate_trajectory(t_hold, t_hold+t_swing1, q_0, q_f);
}
if(fsm_state == fsm_swing1 && d->time >= t_hold+t_swing1) {
fsm_state = fsm_swing2;
double q_0[2] = {0}, q_f[2] = {0};
q_0[0] = 0.5; q_0[1] = -2;
q_f[0] = 1; q_f[1] = 0;
generate_trajectory(t_hold+t_swing1, t_hold+t_swing1+t_swing2, q_0, q_f);
}
if(fsm_state == fsm_swing2 && d->time >= t_hold+t_swing1+t_swing2) {
fsm_state = fsm_stop;
}
// action
// start: q0 = -1; q1 = 0q
// intermediate: q0 = 0; q1 = -1.57(-pi/2)
// end: q0 = 1; q1 = 0
double q0, q1;
double kp=500, kv=50;
if(fsm_state == fsm_hold) {
// q0 = -1; q1 = 0;
qref[0]=-1; qref[1]=0;
uref[0]=0; uref[1]=0;
d->ctrl[0] = kp*(qref[0] - d->qpos[0]) + kv*(uref[0]-d->qvel[0]);
d->ctrl[3] = kp*(qref[1] - d->qpos[1]) + kv*(uref[1]-d->qvel[1]);
// d->ctrl[1] = q0;
// d->ctrl[4] = q1;
}
else if(fsm_state == fsm_swing1) {
// q0 = 0; q1 = -1.57;
for(int i=0; i<2; i++) {
qref[i] = a0[i] + a1[i]*t + a2[i]*t*t + a3[i]*t*t*t;
uref[i] = a1[i] + 2*a2[i]*t + 3*a3[i]*t*t;
}
d->ctrl[0] = kp*(qref[0] - d->qpos[0]) + kv*(uref[0] -d->qvel[0]);
d->ctrl[3] = kp*(qref[1] - d->qpos[1]) + kv*(uref[1] -d->qvel[1]);
// d->ctrl[1] = q0;
// d->ctrl[4] = q1;
}
else if(fsm_state == fsm_swing2) {
// q0 = 1; q1 = 0;
for(int i=0; i<2; i++) {
qref[i] = a0[i] + a1[i]*t + a2[i]*t*t + a3[i]*t*t*t;
uref[i] = a1[i] + 2*a2[i]*t + 3*a3[i]*t*t;
}
d->ctrl[0] = kp*(qref[0] - d->qpos[0]) + kv*(uref[0] -d->qvel[0]);
d->ctrl[3] = kp*(qref[1] - d->qpos[1]) + kv*(uref[1] -d->qvel[1]);
// d->ctrl[1] = q0;
// d->ctrl[4] = q1;
}
else if(fsm_state == fsm_stop) {
// q0 = 1; q1 = 0;
qref[0]=1; qref[1]=0;
uref[0]=0; uref[1]=0;
d->ctrl[0] = kp*(qref[0] - d->qpos[0]) + kv*(uref[0]-d->qvel[0]);
d->ctrl[3] = kp*(qref[1] - d->qpos[1]) + kv*(uref[1]-d->qvel[1]);
// d->ctrl[1] = q0;
// d->ctrl[4] = q1;
}
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_chk_period==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
This post is licensed under CC BY 4.0 by the author.