mujoco-200-tutorials-Lec6: Jacobian and its use for Inverse Kinematics
이번 시간에는 torque를 출력변수로하는 position control을 하려는 게 아니고, Jacobian과 Inverse Kinematics(IK)를 위한 Jacobian(여기서는 3D position에 대한)의 사용에 관심이 있다.
jacobian (jacobi matrix나 jacobi determinant를 총칭해서 부름):
다음과 같이 1차 편도함수로 구성된 행렬이다.
\[\mathbf {J} _{ij}={\frac {\partial f_{i}}{\partial x_{j}}}\] \[\mathbf {J} ={\begin{bmatrix}{\dfrac {\partial \mathbf {f} }{\partial x_{1}}}&\cdots &{\dfrac {\partial \mathbf {f } }{\partial x_{n}}}\end{bmatrix}}={\begin{bmatrix}\nabla ^{\mathrm {T} }f_{1}\\\vdots \\\nabla ^{\mathrm {T} }f_{m}\end{bmatrix}}={\begin{bmatrix}{\dfrac {\partial f_{1}}{\partial x_{1}}}&\cdots &{\dfrac {\partial f_{1}}{\partial x_{n}}}\\\vdots &\ddots &\vdots \\{\dfrac {\partial f_{m}}{\partial x_{1}}}&\cdots &{\dfrac {\partial f_{m}}{\partial x_{n}}}\end{bmatrix}}\]Full code
Endeffector’s position and velocity(site,framepos,framelinvel)
jacobian에 joint angular velocity를 곱하여 얻은 end-effector의 linear velocity와 framelinvel를 비교해볼 것이다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
<mujoco>
<option timestep="0.00005" integrator="RK4" gravity="0 0 -1">
<flag energy="enable" contact="disable"/>
</option>
<worldbody>
<light diffuse=".5 .5 .5" pos="0 0 3" dir="0 0 -1"/>
<geom type="plane" size="1 1 0.1" rgba=".9 0 0 1"/>
<body pos="0 0 1.25" euler="0 90 0">
<joint name="pin1" type="hinge" pos="0 0 -.5" axis="0 -1 0"/>
<geom type="cylinder" size=".05 .5" rgba="0 .9 0 1" mass="1"/>
<body pos="0 0.1 1" euler="0 0 0">
<joint name="pin2" type="hinge" pos="0 0 -.5" axis="0 -1 0"/>
<geom type="cylinder" size=".05 .5" rgba="0 0 .9 1" mass="1"/>
<site name="endeffector" pos="0 0 .5" size="0.1"/>
</body>
</body>
</worldbody>
<actuator>
<position name="pservo1" joint="pin1" kp="0"/>
<velocity name="vservo1" joint="pin1" kv="0"/>
<position name="pservo2" joint="pin2" kp="0"/>
<velocity name="vservo2" joint="pin2" kv="0"/>
</actuator>
<sensor>
<framepos objtype="site" objname="endeffector"/>
<framelinvel objtype="site" objname="endeffector"/>
</sensor>
</mujoco>
Get jacobian
아래 코드에서 jacobian은 jacp(3x2)이다.
각 row는 position x,y,z의 각 joint에 대한 gradient를 나타낸다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
void mycontroller(const mjModel* m, mjData* d)
{
//write control here
// printf("position = %f %f %f\n", d->sensordata[0], d->sensordata[1], d->sensordata[2]);
// printf("velocity = %f %f %f\n", d->sensordata[3], d->sensordata[4], d->sensordata[5]);
// mj_jac(const mjModel* m, const mjData* d, mjtNum* jacp, mjtNum* jacr, const mjtNum point[3], int body);
double jacp[6] = {0};
double point[3] = {d->sensordata[0], d->sensordata[1], d->sensordata[2]};
int body = 2;
mj_jac(m,d,jacp,NULL,point,body);
// printf("J = \n"); // 3x2
// printf("%f %f \n", jacp[0], jacp[1]);
// printf("%f %f \n", jacp[2], jacp[3]);
// printf("%f %f \n", jacp[4], jacp[5]);
// printf("******\n");
double J[4] = {jacp[0], jacp[1], jacp[4], jacp[5]};
double qdot[2] = {d->qvel[0], d->qvel[1]};
double xdot[2] = {0};
// void mju_mulMatVec(mjtNum* res, const mjtNum* mat, const mjtNum* vec, int nr, int nc);
mju_mulMatVec(xdot,J,qdot,2,2);
printf("velocity using jacobian(x,z): %f %f \n", xdot[0], xdot[1]);
printf("velocity using sensor(x,z): %f %f \n", d->sensordata[3], d->sensordata[5]);
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_chk_period==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
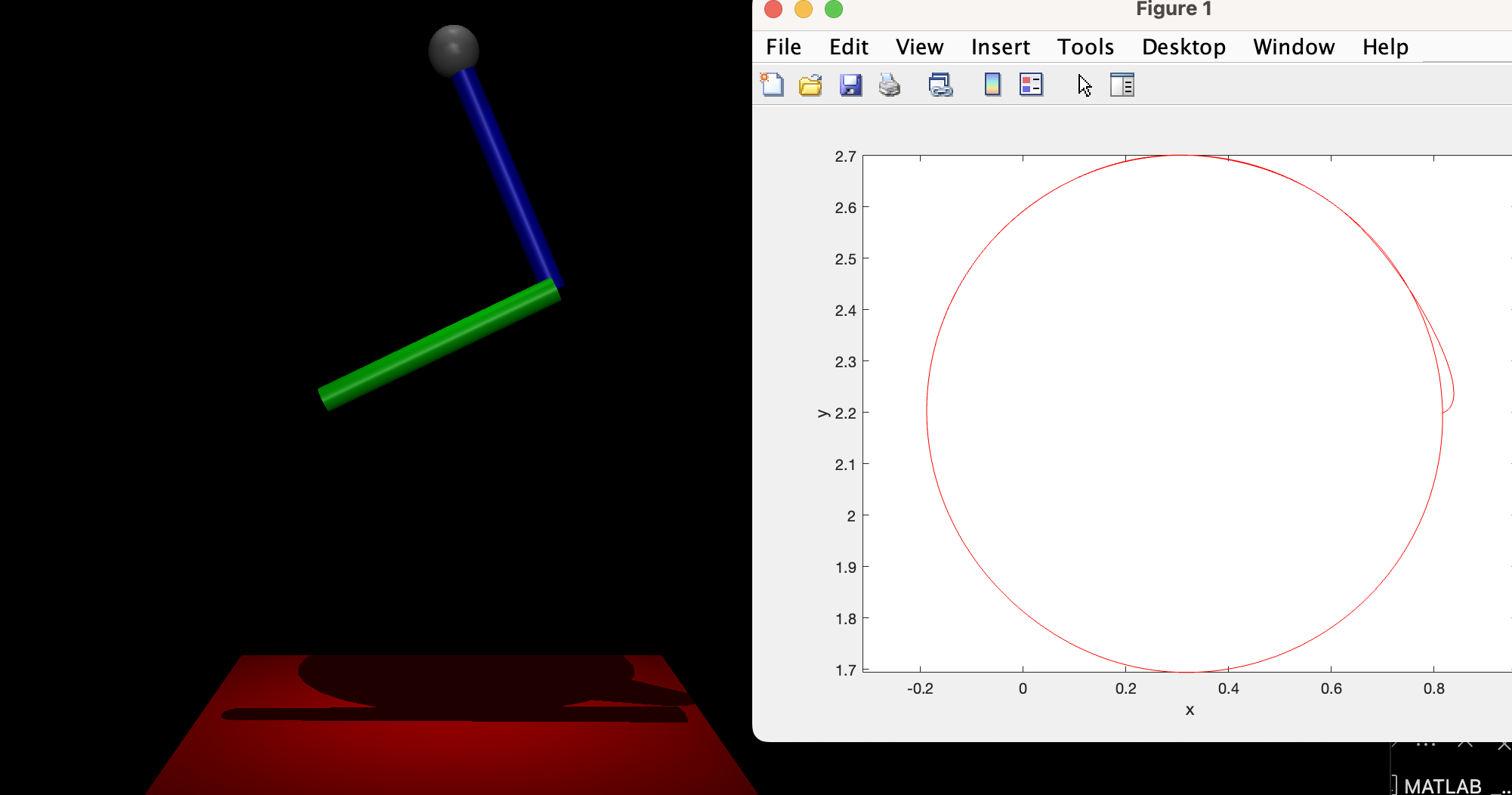
IK
이 방법은 position의 변화가 미소하다는 가정을 만족해야한다. 만약 position의 큰 변화에 대해 IK의 해를 구하고 싶다면, nonliner solver가 필요하다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
void mycontroller(const mjModel* m, mjData* d)
{
// write control here
// printf("position = %f %f %f\n", d->sensordata[0], d->sensordata[1], d->sensordata[2]);
// printf("velocity = %f %f %f\n", d->sensordata[3], d->sensordata[4], d->sensordata[5]);
// mj_jac(const mjModel* m, const mjData* d, mjtNum* jacp, mjtNum* jacr, const mjtNum point[3], int body);
double jacp[6] = {0};
double point[3] = {d->sensordata[0], d->sensordata[1], d->sensordata[2]};
int body = 2;
mj_jac(m,d,jacp,NULL,point,body);
// printf("J = \n"); // 3x2
// printf("%f %f \n", jacp[0], jacp[1]);
// printf("%f %f \n", jacp[2], jacp[3]);
// printf("%f %f \n", jacp[4], jacp[5]);
// printf("******\n");
double J[4] = {jacp[0], jacp[1], jacp[4], jacp[5]};
double qdot[2] = {d->qvel[0], d->qvel[1]};
double xdot[2] = {0};
// void mju_mulMatVec(mjtNum* res, const mjtNum* mat, const mjtNum* vec, int nr, int nc);
mju_mulMatVec(xdot,J,qdot,2,2);
// printf("velocity using jacobian(x,z): %f %f \n", xdot[0], xdot[1]);
// printf("velocity using sensor(x,z): %f %f \n", d->sensordata[3], d->sensordata[5]);
// d->ctrl[0] = qinit[0];
// d->ctrl[2] = qinit[1];
double det_J = J[0]*J[3] - J[1]*J[2];
double temp_J[4] = {J[3],-J[1],-J[2],J[0]};
double inv_J[4] = {0};
for(int i=0; i<4; i++) {
inv_J[i] = temp_J[i]/det_J;
}
// trajectory in task space
double x,y;
x = x_0 + r*cos(omega*d->time);
y = y_0 + r*sin(omega*d->time);
// dq = Jinv*dr
double dr[2] = {x-d->sensordata[0], y-d->sensordata[2]};
double dq[2] = {};
mju_mulMatVec(dq,inv_J,dr,2,2);
// q = q+dq // ctrl = q
d->ctrl[0] = d->qpos[0] + dq[0];
d->ctrl[2] = d->qpos[1] + dq[1];
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_chk_period==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
This post is licensed under CC BY 4.0 by the author.