mujoco-200-tutorials-Lec9: 2D Hopper
2-D hopper에 대해 fsm으로 제어해보자.\
- knee의 position control\
- torso의 height control
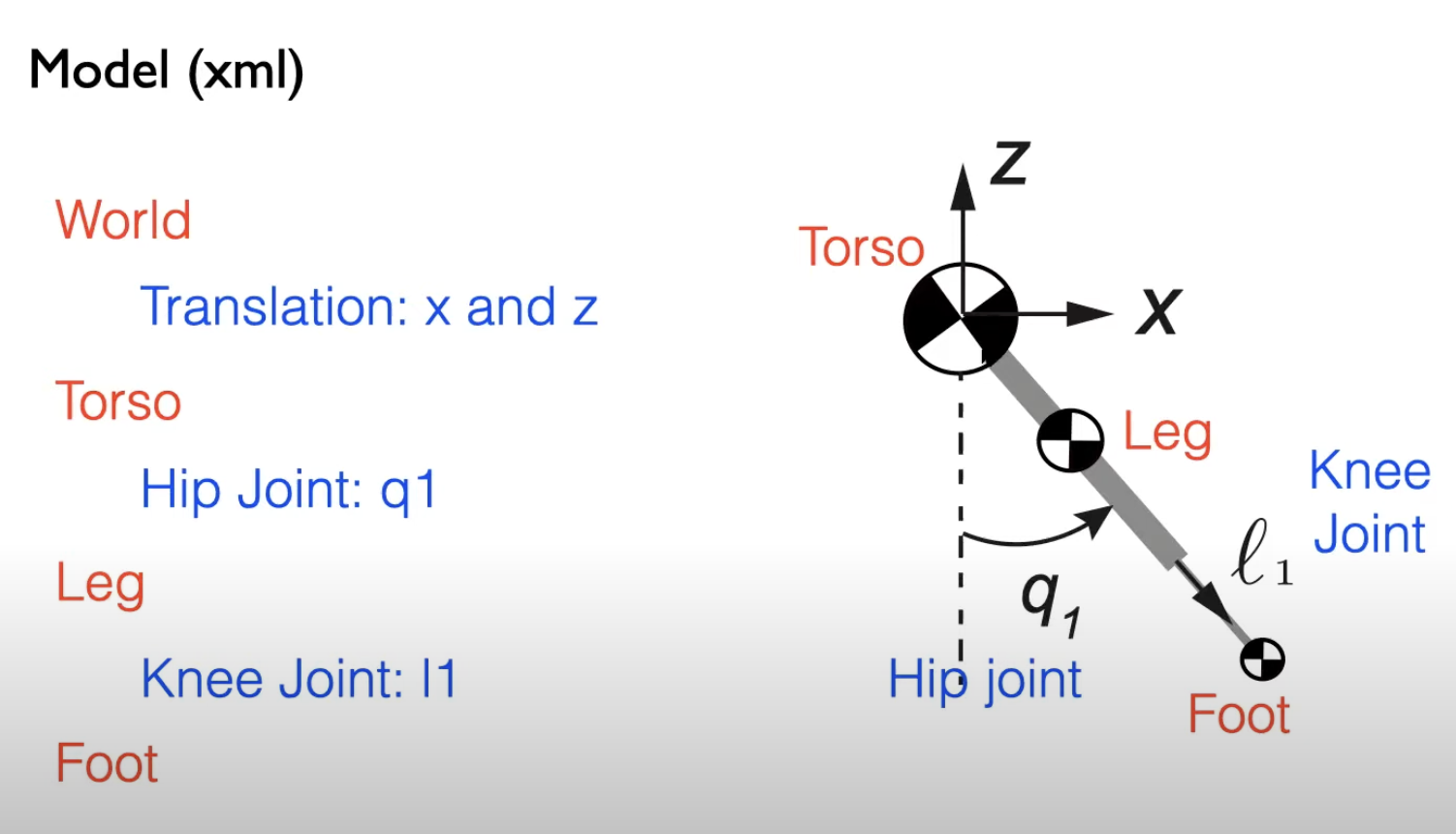
구조
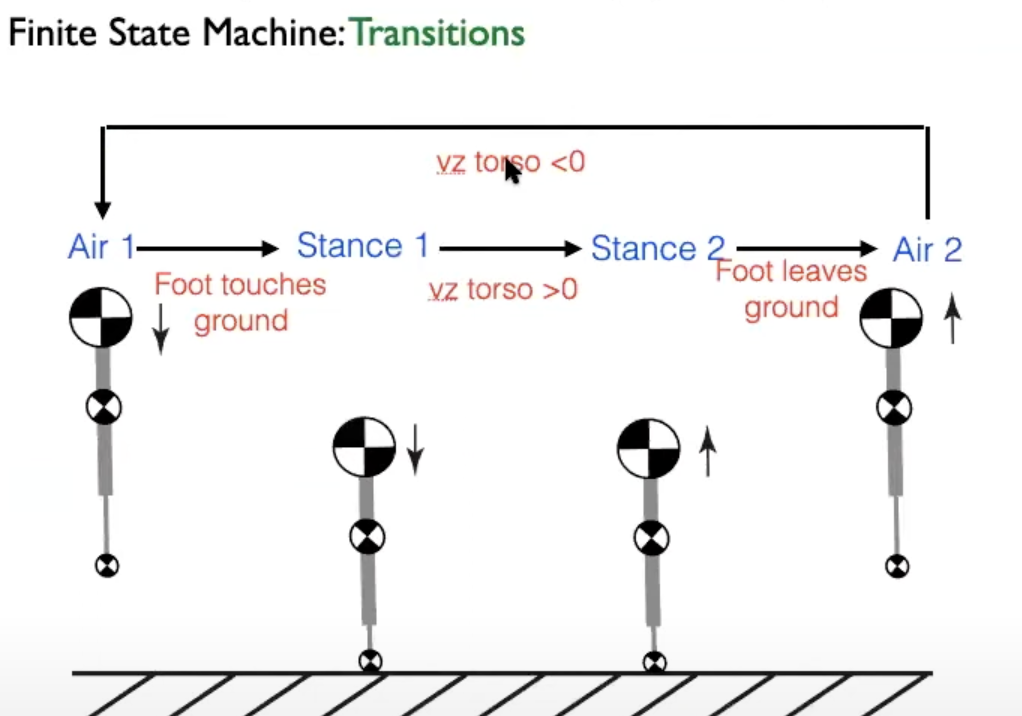
FSM state transition
Full code
knee의 position control
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
void mycontroller(const mjModel* m, mjData* d)
{
// write control here
// get data for transition
int body_no;
body_no = 3;
// // xpos는 body frame position, qpos는 joint등의 position
// printf("%f %f %f \n", d->xpos[3*body_no+0], d->xpos[3*body_no+1], d->xpos[3*body_no+2]);
// printf("z velocity of torso: %f \n", d->qvel[1]);
// printf("===============\n");
// all transition
double z_foot = d->xpos[3*body_no+2];
double vz_torso = d->qvel[1];
if(fsm == fsm_air1 && z_foot < 0.05) {
fsm = fsm_stance1;
// printf("fsm_stance1\n");
}
else if(fsm == fsm_stance1 && vz_torso > 0) {
fsm = fsm_stance2;
// printf("fsm_stance2\n");
}
else if(fsm == fsm_stance2 && z_foot > 0.05) {
fsm = fsm_air2;
// printf("fsm_air2\n");
}
else if(fsm == fsm_air2 && vz_torso < 0) {
fsm = fsm_air1;
// printf("fsm_air1\n");
step_no++;
printf("step no = %d \n", step_no);
}
// all actions
int actuator_no;
if(fsm == fsm_air1) {
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1000);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
}
else if(fsm == fsm_stance1) {
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1000);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
}
else if(fsm == fsm_stance2) {
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1000);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
}
else if(fsm == fsm_air2) {
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,100);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,10);
}
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_chk_period==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
torso의 height control
fsm_stance2에서 hip을 d->ctrl[0] = -0.2로 살짝돌렸다가,
fsm_stance1에서 hip을 d->ctrl[0] = 0으로 원래대로 돌린다.
그럼 총 에너지는 그대로이지만, 앞으로 전진하기위해 에너지를 사용하므로 높이는 점점 감소하는 것을 볼 수 있다.(step no = 28에서 정지)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
void mycontroller(const mjModel* m, mjData* d)
{
// write control here
// get data for transition
int body_no;
body_no = 3;
// // xpos는 body frame position, qpos는 joint등의 position
// printf("%f %f %f \n", d->xpos[3*body_no+0], d->xpos[3*body_no+1], d->xpos[3*body_no+2]);
// printf("z velocity of torso: %f \n", d->qvel[1]);
// printf("===============\n");
// all transition
double z_foot = d->xpos[3*body_no+2];
double vz_torso = d->qvel[1];
if(fsm == fsm_air1 && z_foot < 0.05) {
fsm = fsm_stance1;
// printf("fsm_stance1\n");
}
else if(fsm == fsm_stance1 && vz_torso > 0) {
fsm = fsm_stance2;
// printf("fsm_stance2\n");
}
else if(fsm == fsm_stance2 && z_foot > 0.05) {
fsm = fsm_air2;
// printf("fsm_air2\n");
}
else if(fsm == fsm_air2 && vz_torso < 0) {
fsm = fsm_air1;
// printf("fsm_air1\n");
step_no++;
printf("step no = %d \n", step_no);
}
// all actions
int actuator_no;
if(fsm == fsm_air1) {
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,100);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,10);
}
else if(fsm == fsm_stance1) {
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1000);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
}
else if(fsm == fsm_stance2) {
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1000);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
d->ctrl[0] = -0.2;
}
else if(fsm == fsm_air2) {
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,100);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,10);
d->ctrl[0] = 0;
}
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_chk_period==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
xml에서 light가 torso를 비추게한다.
1
2
3
4
5
6
7
<visual>
<headlight ambient=".3 .3 .3"/>
</visual>
<worldbody>
<!-- <light diffuse=".5 .5 .5" pos="0 0 3" dir="0 0 -1"/> -->
<!-- <light mode="targetbody" target="torso"/> -->
This post is licensed under CC BY 4.0 by the author.